LINE FOLLOWER ROBOT

Robot is a machine that is usually designed to reduce the amount of human work where it is applicable.In this paper a line tracer or follower has been presented which will trace a black line on a white surface or vice-versa . We have make use of sensors to achieve this objective. The main component behind this robot is Arduino UNO which is a brain of this robot. The idea proposed in this paper is by using machine vision to guide the robot We have made a robot that has several works to perform besides following a line. This robot follows a line without going to other direction. The construction of the robot circuit is easy and small. This can also be used in many applications such as automatic valet parking in efficient way. The rapid increase in urban car ownership not only increases the burden of urban traffic but also exacerbates the problem of insufficient parking spaces. The increased driving distance in the parking process increases energy consumption and exacerbates parking difficulties, which increasing the number of minor accidents, such as scuffing and collisions.
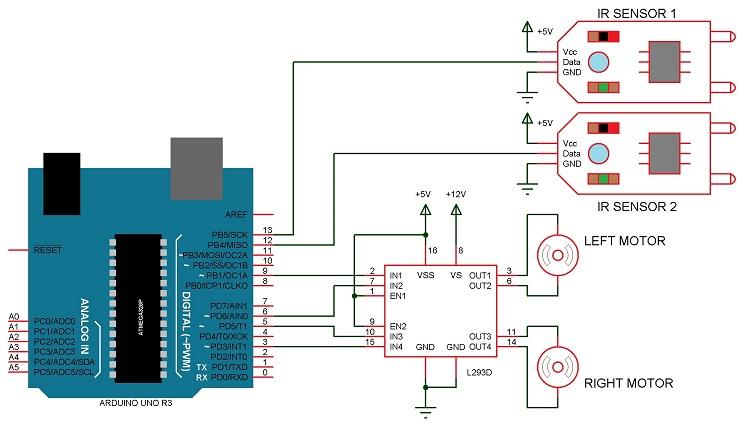
Block Diagram
WORKING PROCEDURE
The line follower robot is a kind of a design which is similar as a light follower robot. Here, besides sensing the light, the sensor is used for detection of a line.It had one pair of Infrared ray sensor fitted underneath the robot. So Infrared ray sensor will first be sending a wavelength for detecting black line and then other infrared ray sensor will be receiving the information and take decision for following a black line on white surface. With the supply from an 9V DC power adapter the whole sensor and the motor driver IC and the motors and arduino are powered. Making the setup less prone to power failure The outputs of the sensor circuits are connected as in the analog inputs of the arduino board.As mentioned in the block diagram, we need sensors to detect the line. For line detection logic, we used two IR Sensors, which consists of IR LED and Photodiode. They are placed in a reflective way i.e. side – by – side so that whenever they come in to proximity of a reflective surface, the light emitted by IR LED will be detected by Photo diode.The following image shows the working of a typical IR Sensor (IR LED – Photodiode pair) in front of a light coloured surface and a black surface. As the reflectance of the light coloured surface is high, the infrared light emitted by IR LED will be maximum reflected and will be detected by the Photodiode.


Comments
Post a Comment